一、概述
SpaceClaim R18.1中增强了对几何处理的功能,新增共享拓扑模块:
几何建模可传送至ANSYS的设计中,在接触或相交主体和曲面之间共享拓扑(面、边和顶点连接)。共享拓扑是在主体相交处进行网格划分的唯一方法,并且也是确保主体相交处完美网格化的唯一方式。熟练运用该功能能使处理较多零件数或配合关系的模型更加便捷,也能更灵活的处理单个几何,对于后续网格划分的质量和效率有很大的提升。
二、共享拓扑功能介绍
首先,介绍在SpaceClaim中早就有的共享拓扑功能。
在结构树中选择一个或多个元件时,可在属性面板找到此属性。
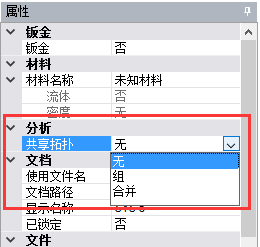
如果元件的共享拓扑设置为合并,则此元件和其下所有元件将成为一个共享组。
结构中较低元件的共享拓扑特性将会忽略,例如:如果将根元件的共享拓扑设置为合并,则整个模型都会在一个共享组中。可以拥有多个不同的共享组,但一个主体仅可属于一个组。
示例:
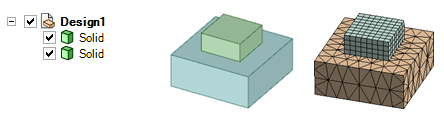
ANSYS 网格划分两个共享拓扑的块体。蓝色块体会获得在两个蓝绿块体之间共享的新压印面。请注意小块体底边的网格节点分布。
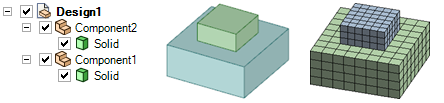
ANSYS 对两个零件进行不同的网格划分,因为其分别处于不同的元件中,并且根零件共享拓扑设定为无。
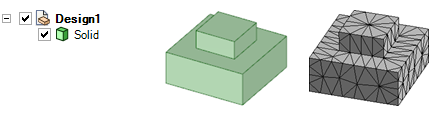
共享拓扑的网格与合并几何不同。此为两个块体合并,可以看出其网格与两个主体共享拓扑的网格有所不同。
下面介绍SpaceClaim R18.1中新增的共享拓扑功能:

相较于SpaceClaimR18,R18.1将仿真和ANSYS Workbench 子模块与新增的共享子模块一起创建了新的模块:Workbench模块。
SharePrep:
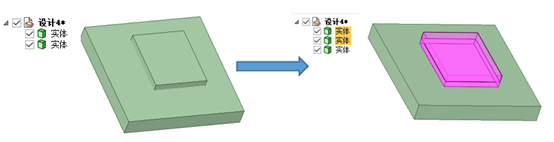
将干涉的几何部分分割出来
共享:

仅共享单个边 :

共享4边1面
取消共享:
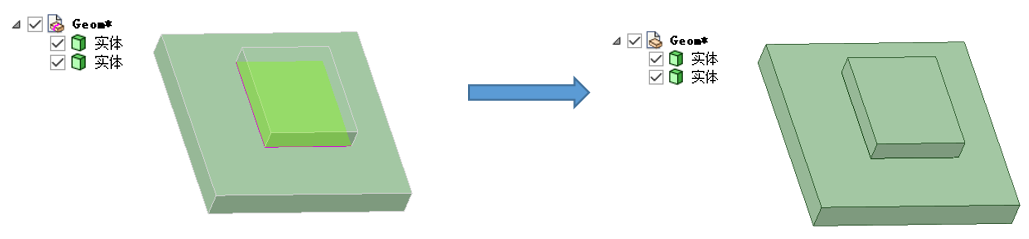
可以点选单个取消也可以框选全部取消
查看连接的主体:
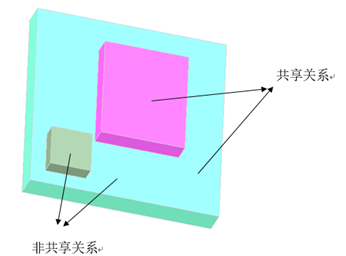
可以快速查看设置的各零件的共享关系
三、总结
SpaceClaim R18.1 新增的共享拓扑功能在几何处理阶段就能自由进行网格共享节点的设置,相对于以往在Mechanical界面下对网格设置(如Node Merge),其不仅效率更高,而且保障了结果的准确性。故熟练掌握该功能对结构工程师来说是必需的。
| 




